Devpost
Participate in our public hackathons
Devpost for Teams
Access your company's private hackathons
Grow your developer ecosystem and promote your platform
Drive innovation, collaboration, and retention within your organization
By use case
Blog
Insights into hackathon planning and participation
Customer stories
Inspiration from peers and other industry leaders
Planning guides
Best practices for planning online and in-person hackathons
Webinars & events
Upcoming events and on-demand recordings
Help desk
Common questions and support documentation
A vision-first autonomous robot for where lidar fails.
Robotics maintenance systems capable of paving the future of power in space
A controller-driven parent-subunit rover system for routing crucial power/data/tether lines across lunar terrain and inside a moon base, with live OLED telemetry.
Teleop pipe-stacker robot that assembles a stable vertical conduit for lunar base utilities including fast, precise stacking with an ergonomic controller.
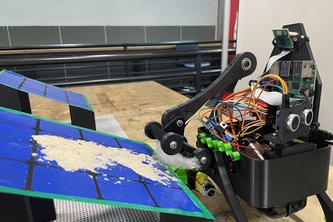
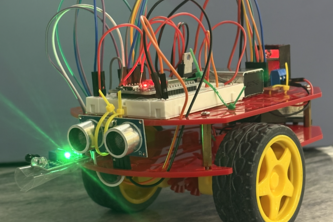
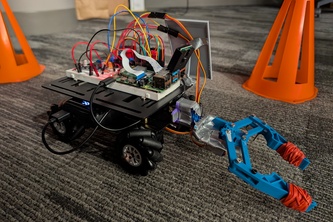
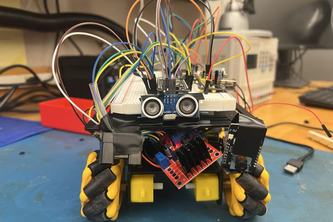
Our project is a space-exploration rover designed to autonomously scan planetary surfaces and count potential shiny or metallic objects during exploration, using ultrasonic and IR sensing.
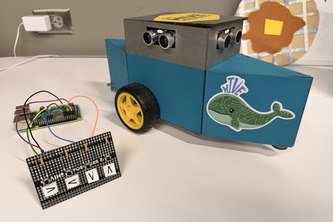
LAVAgirl - Lunar Autonomous Vehicle for Assessment
Autonomous robot using PyTorch-based computer vision to clear 95% of landing-area debris and deploy/reload transponding beacons, potentially saving $245M in landing-related accidents.
Our team designed a compact, reusable, and easy-to-control robot capable of operating effectively in a space environment. We successfully demonstrated a robot that can be controlled with ease.
Turn faraway wastelands into habitable paradises by planting seeds -- remotely control a robot that will cover a planet with plants and create an oxygen-rich atmosphere.
⊹ ࣪ ˖ Terrain Observation & Fieldwork Unit ⊹ ࣪ ˖
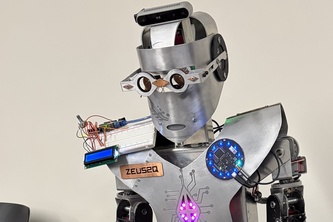
Alone in space, astronauts need more than tools. Nebula Blue is a humanoid companion for astronauts, featuring intelligent perception, verbal interaction, and integrated environmental sensing.
Real-Time Emotional Support Assistant for Astronauts
Find ore from cave systems on Mars easily
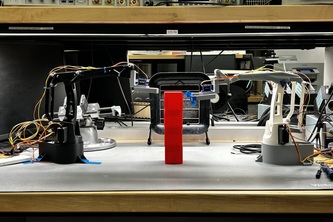
A pair of highly reliable, robust model arms for space applications, including live maintenance, outdoor assembly, and shipping!
Stellaris addresses the challenge of safely using space rovers by combining intuitive dual-joystick control with real-time sensor feedback and hazard alerts to reduce operator error in extreme terrain
Enceladus is covered with dark oceans with potential for life. Sonar-bot uses sensors and 3D sound for precise remote control exploration and data collection in unfriendly camera navigation terrains.
Moon Water Analysis
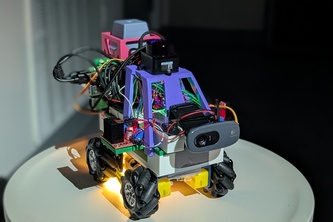
Stinger V is a lightweight exploration robot using dual ESP32s instead of a single-board computer, enabling wireless control, live vision, and object retrieval with low power and reduced weight.
What if astronauts could simply talk to their robots? What if a geologist could say "Go scan that crater formation and take soil samples" the same way they'd brief a field assistant on Earth?
Creating a robot that navigates the moon, helping humanity and the future move towards a convenient and cheaper future.
We scan the hull. You scan the stars. Hull-crawling robot that can detect and image spaceship damage before it becomes critical, allowing for targeted repairs and smart allocation of resources.
An agile, high range, low latency rover designed to navigate and explore the harsh terrains of our moon.
HERMES is a lunar rover that tracks vitals during EVA using wearable bands, navigates hazards autonomously, and delivers emergency medical and suit-repair supplies, then returns to base.
We are making robot swarms, revolutionizing space exploration.
1 – 24 of 25